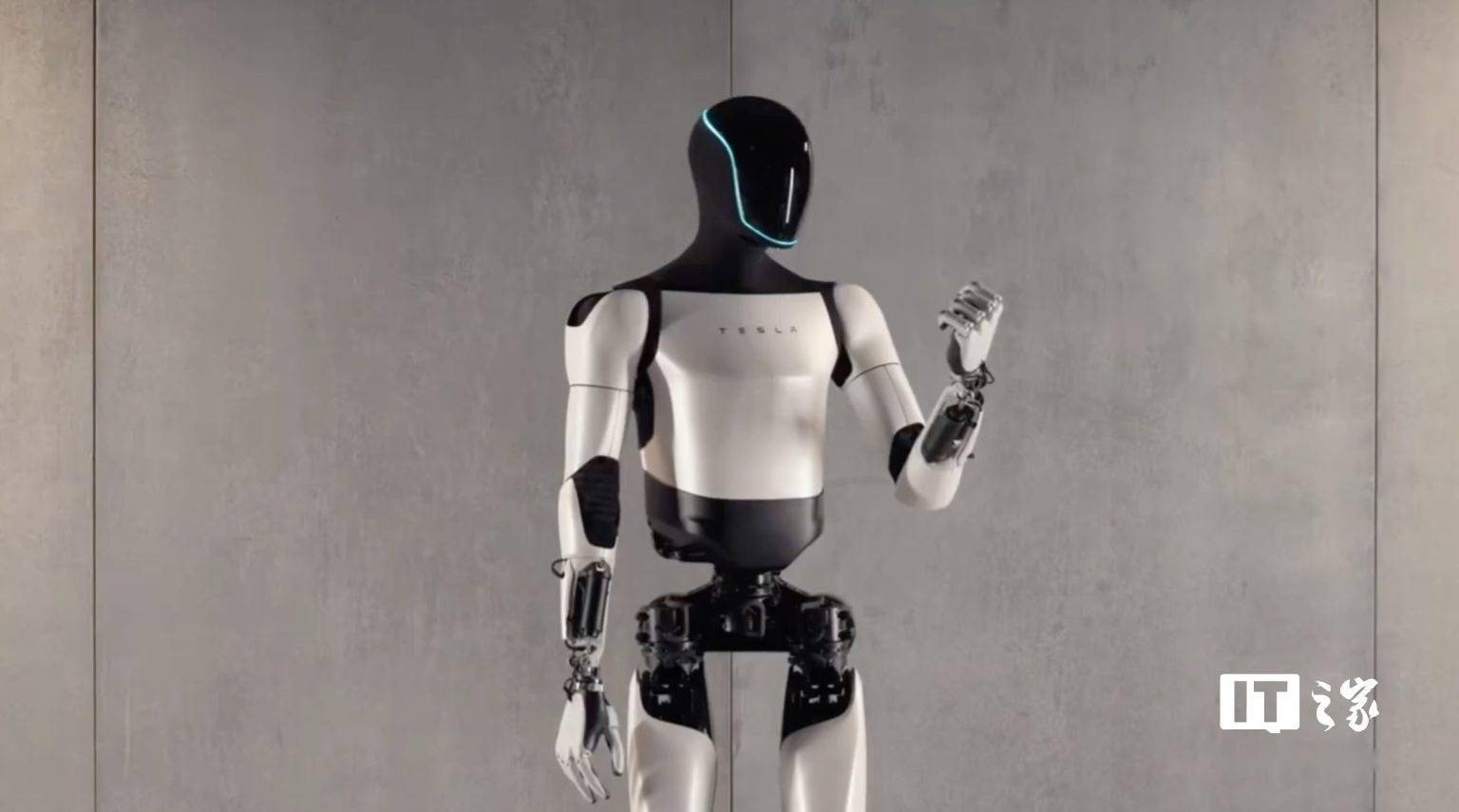
特斯拉近期公布了一段令人矚目的視頻,展示了其研發的人形機器人Optimus在復雜地形上的行走能力取得了顯著進步。在這段視頻中,Optimus在布滿護根物的陡峭山丘上穩健前行,展現了其出色的平衡與適應能力。
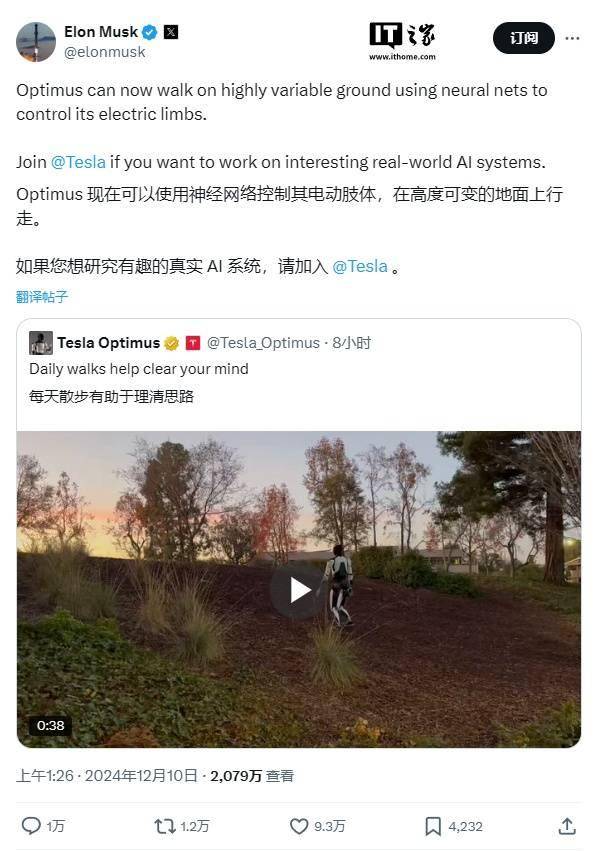
特斯拉CEO埃隆·馬斯克在社交媒體平臺上對這一成果表示了贊賞,并透露Optimus通過先進的神經網絡控制其電動肢體,無需人工遠程操控即可在崎嶇地形中自如行走。這一技術突破,標志著Optimus在自主行動能力上邁出了重要一步。
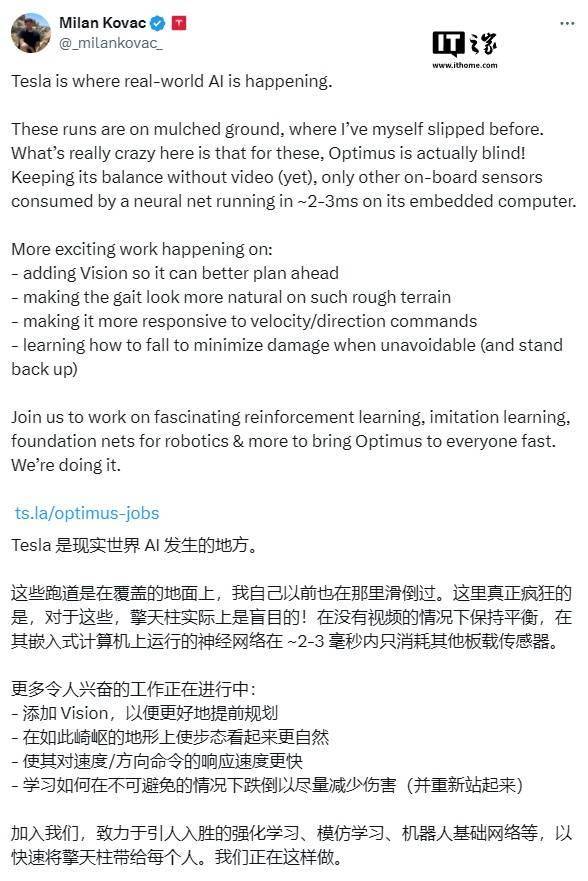
特斯拉Optimus工程副總裁米蘭·科瓦奇同樣對視頻進行了轉發,并分享了更多細節。他指出,Optimus在行走過程中并未依賴視覺系統,而是完全依靠自身的平衡機制來應對復雜地形。科瓦奇還透露,他曾親自在Optimus行走的地點嘗試過,結果不慎滑倒,這進一步證明了地形的挑戰性。
科瓦奇還表示,特斯拉未來計劃為Optimus增加視覺系統,并持續優化其行走姿態、響應速度和跌倒恢復能力,以提升其整體性能。
特斯拉還發布了Optimus使用新型機械手接球的視頻。盡管目前仍需遠程操控,但馬斯克透露,Optimus有望在明年實現自主接球功能。特斯拉還計劃在今年年底前為Optimus配備具有22個自由度的雙手,這將為其執行更多復雜任務提供可能。

據特斯拉透露,Optimus預計將在2026年開始大規模生產,并計劃在2027年前交付給外部客戶。目前,Optimus已經在特斯拉工廠內承擔了一些簡單任務,如電池分類等,展現了其在工業領域的潛在應用價值。






















