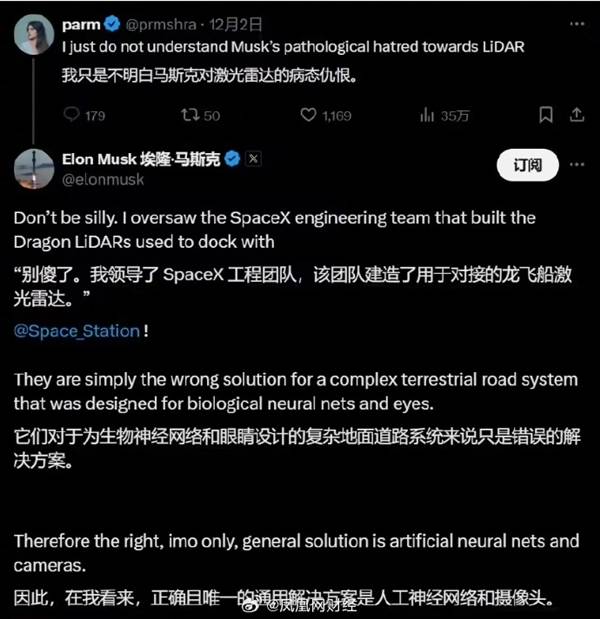
近期,特斯拉的首席執(zhí)行官埃隆·馬斯克再次對激光雷達(dá)技術(shù)提出了批評,他認(rèn)為這是自動駕駛領(lǐng)域的一個“誤區(qū)”,這一言論迅速在網(wǎng)絡(luò)上引發(fā)了廣泛討論。
馬斯克堅(jiān)持認(rèn)為,在復(fù)雜的道路環(huán)境中,模擬生物神經(jīng)網(wǎng)絡(luò)和眼睛的視覺系統(tǒng)才是最優(yōu)解。他強(qiáng)調(diào),這種“純視覺”方案能夠更有效地處理復(fù)雜的駕駛場景。
然而,與特斯拉的“純視覺”路線有所不同,中國的汽車制造商和供應(yīng)商大多采用了融合感知方案。該方案融合了激光雷達(dá)、攝像頭、毫米波雷達(dá)等多種傳感器,旨在提升系統(tǒng)的感知能力和冗余度,以確保自動駕駛的安全性和可靠性。
盡管融合感知方案在業(yè)界得到了廣泛應(yīng)用,但馬斯克仍然對其持懷疑態(tài)度。他認(rèn)為,激光雷達(dá)與雷達(dá)和視覺的結(jié)合會導(dǎo)致“感知不一致性”,從而影響自動駕駛技術(shù)的效果。他堅(jiān)持認(rèn)為,特斯拉的“純視覺”方案才是最佳選擇。
長安汽車執(zhí)行副總裁張曉宇則持有不同觀點(diǎn)。他認(rèn)為,從長遠(yuǎn)來看,采用激光雷達(dá)等多種傳感器組合方案的智能駕駛系統(tǒng),如華為的智駕系統(tǒng),更有可能超越人類的駕駛水平。張曉宇指出,這種組合方案可以實(shí)現(xiàn)全環(huán)境的感知能力,從而提高智能駕駛的安全性和上限。
張曉宇還表示,純視覺方案在某些惡劣天氣條件下,如大雨、暴雨、濃霧或黑夜中,感知能力可能會受到限制,從而對智能駕駛的安全性構(gòu)成挑戰(zhàn)。他認(rèn)為,華為的智能駕駛系統(tǒng)之所以具有這樣的實(shí)力,是因?yàn)槠鋼碛懈蟮乃懔托袠I(yè)領(lǐng)先的智能化體驗(yàn)。
張曉宇進(jìn)一步解釋說,純視覺方案的算法相對被動,主要依賴環(huán)境光進(jìn)行感知。相比之下,融合了激光雷達(dá)等多種傳感器的智能駕駛系統(tǒng)則能夠更全面地感知周圍環(huán)境,從而提高自動駕駛的安全性和可靠性。

張曉宇還表示,華為在智能駕駛領(lǐng)域的投入和研發(fā)實(shí)力也是其能夠取得領(lǐng)先地位的重要原因之一。他認(rèn)為,隨著技術(shù)的不斷進(jìn)步和市場的不斷發(fā)展,智能駕駛系統(tǒng)將會越來越成熟和完善。























