近日,天津大學攜手清華大學,在腦機接口技術領域取得了突破性進展。他們共同研發出基于憶阻器神經形態器件的創新“雙環路”無創腦機接口系統,并成功應用于無人機操控,這一研究成果已在《自然·電子》雜志公開發表。
相較于傳統的純數字硬件方案,該創新方案在人腦對無人機的操控效率上展現出了巨大優勢。其歸一化解碼速度實現了飛躍式提升,高達兩個數量級以上,同時能耗卻大幅度降低,減少了三個數量級。這種高效能與低能耗的結合,為人腦四自由度精準操控無人機奠定了堅實基礎。

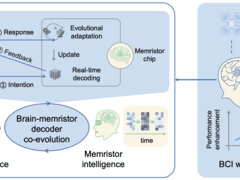
在一項持續6小時的長時程腦機交互實驗中,該系統表現出了獨特的智能演進特性。實驗初期,解碼器的自適應更新占據主導地位,隨著時間推移,大腦的貢獻逐漸增強。這一過程中,腦機接口的性能非但沒有下降,反而準確率顯著提升了約20%,充分驗證了系統的穩定性和可靠性。
值得注意的是,該“雙環路”無創腦機接口系統在實驗中的表現令人矚目。它不僅實現了高效的人腦對無人機四自由度操控,還在連續長時間交互中展現了出色的適應性和穩定性。這一突破不僅為腦機接口技術的發展注入了新的活力,也為未來智能人機交互的廣泛應用提供了有力支撐。